Quelques explications Activité 1 (1re STD2A) Activité 2 (1re STD2A)
Exercices (Term STD2A)
Fonction de retouche (Term générale)
Opérateur Locaux
La synthèse additive
Niveau : filières STD2A (et générale). Lien avec « Les maths au quotidien : Représentations visuelles.
La couleur est une perception subjective de l’œil, liée à la lumière.
Cette sensation dépend de la structure de l’œil et de la longueur d’onde de l’onde lumineuse que l’œil perçoit.
La lumière visible est la partie du spectre électromagnétique qui est visible pour l’œil humain. Il n’y a pas de limite exacte au spectre visible : l’œil humain possède généralement une sensibilité maximale à la lumière de longueur d’onde d'environ 550 nm, ce qui correspond à une couleur jaune-verte.
Généralement, on considère que la réponse de l’œil couvre les longueurs d'ondes de 380 nm à 780 nm bien qu'une gamme de 400 nm à 700 nm soit plus commune.
La synthèse additive
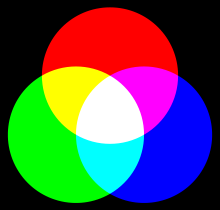
On parle de synthèse additive des couleurs quand on additionne plusieurs sources lumineuses colorées pour former une nouvelle couleur. L’exemple le plus parlant pour illustrer la synthèse additive est le mélange de couleurs à l'aide de projecteurs lumineux.
Dès 1802, Young puis Helmholtz ont avancé l’hypothèse qu’il est possible de reproduire n’importe quelle couleur en additionnant seulement trois couleurs, dites couleurs primaires, que sont le rouge, le vert et le bleu (RVB). Cette loi, appelée synthèse additive, suggère l’existence dans la rétine de trois sortes de cellules photo réceptrices sensibles au rouge, au vert et au bleu.
Cette hypothèse a été confirmée par des analyses physiologiques et biochimiques de l’œil : pour apprécier les couleurs, la rétine humaine contient trois sortes de cônes, chacun sensible à des longueurs d’onde associées à ces trois couleurs.
L’intensité totale perçue par ces cellules sensorielles correspond à la notion de luminosité (clair ou sombre), et les intensités relatives perçues restituent la couleur. Si les couleurs vives se démarquent des autres, la limite entre ces couleurs n'est pas précise. Pour l'œil humain, il y a un continuum de couleurs dans un espace à trois dimensions, ce qui rend difficile sa représentation sur une surface comme une feuille ou un écran d'ordinateur.
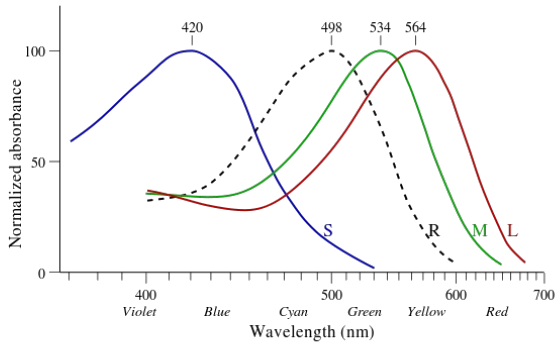
Zone de sensibilité des trois cônes et des bâtonnets en fonction de la longueur d'onde.
Les cônes L sont sensibles aux ondes longues (700 nm), donc les rouges.
Les cônes M sont sensibles aux ondes moyennes (546 nm), donc les verts.
Les cônes S sont sensibles aux ondes courtes (436 nm), donc les bleus.
Ces récepteurs sont en fait sensibles à une bande de longueur d'onde correspondant approximativement, conjointement à cet intervalle de 436 nm à 700 nm et, individuellement, à ces valeurs (L, M et S).
La synthèse additive est donc rendue possible par la façon dont l’œil humain détecte la couleur ; ce n'est pas une propriété intrinsèque de la lumière. En effet, il y a une grande différence « physique » entre une lumière jaune, de longueur d’onde 580 nm, et un mélange de lumières rouge et verte. Cependant, ces deux phénomènes stimulent les cellules de l’œil de façon semblable, ce qui fait que l’on perçoit deux couleurs identiques.
C’est ce qu’on appelle le métamérisme.
En synthèse additive :
• L'addition de ces trois couleurs donne du blanc.
• L'absence de couleur donne du noir.
• l'addition deux à deux de ces lumières colorées dites " primaires " permet d'obtenir des lumières dites "secondaires". Par exemple, avec le rouge, le vert et le bleu :
◦ le rouge et le vert donnent le jaune (J).
◦ le rouge et le bleu donnent le magenta (M).
◦ le bleu et le vert donnent le cyan (C).
Ces couleurs secondaires constituent les couleurs primaires de la synthèse soustractive utilisée en imprimerie ou en peinture (couleur pigment).
Remarque : bien que la synthèse additive est généralement employée avec les primaires RVB (rouge, vert, bleu), elle peut être fondée sur l'association d'autres primaires. On peut également obtenir une synthèse additive avec un nombre de couleurs primaires supérieure à 3.
Ci-contre le cercle chromatique continu, avec les triangles des couleurs primaires RVB et secondaires JMC.
La synthèse additive est le principe de composition des couleurs utilisé notamment dans les écrans cathodiques, les écrans LCD et les vidéoprojecteurs tri-tubes.
Voir document « le cube colorimétrique ».
Teinte, Saturation, Valeur
On introduit ici trois caractéristiques importantes de la couleur, que sont la teinte, la valeur et la saturation.
Dans la partie « Teinte, saturation et valeur (aspect mathématique) » nous donnerons des définitions mathématiques de ces trois valeurs numériques.
La teinte
On nomme « teinte » la fréquence ou la résultante des fréquences engendrant l'impression chromatique. Le spectre lumineux se décompose en un dégradé de couleurs allant du violet au rouge. Comme on l’a vu, l'œil humain est le plus souvent incapable de distinguer un jaune monochromatique (une seule longueur d'onde) d'une composition correspondante de vert et de rouge.
L'ensemble des fréquences des ondes lumineuses forme le spectre des teintes (souvent appelé spectre des couleurs) allant des infrarouges aux ultraviolets.
Quand on mélange les deux extrémités du spectre (le violet et le rouge) on n'obtient pas la couleur à mi-distance (le vert) mais une nouvelle couleur (le magenta).
La valeur
On nomme « valeur » d’une couleur (ou luminosité, luminance) l'amplitude lumineuse définissant la couleur ; elle est synonyme de clarté et mesure le degré de clair ou d’obscur d’une couleur ; plus elle est proche du noir, plus la valeur est basse. Cette notion de clarté est intimement liée aux niveaux de gris. Les « gris » sont des valeurs particulières sur l'axe noir-blanc.
Il s'agit toujours d'un mélange (en synthèse additive) d'égale proportion des trois couleurs primaires rouge, vert et bleu. Chacun des gris peut être considéré comme une couleur dépourvue de teinte ; le noir et le blanc sont des gris extrêmes. Le noir est un gris de valeur nulle et correspond à l'absence de toute lumière (aucune lumière n'est reçue par l'œil). Le blanc est un gris de valeur maximale et peut être considéré comme une plénitude de couleurs (l'ensemble des fréquences d'onde lumineuse est reçu par l'œil avec une valeur maximale).
Sur un cercle chromatique, une même teinte déclinée en différentes valeurs.
La saturation
On nomme « saturation » la vivacité (la pureté) d'une couleur, et par opposition, on appelle désaturation, son mélange, plus ou moins important, avec un gris de même valeur. Une couleur peu saturée parait « délavée ».
La saturation d'une couleur est déterminée par une combinaison de son intensité lumineuse et de la distribution de ses différentes longueurs d'ondes dans le spectre des couleurs. La couleur la plus pure est obtenue en utilisant une seule longueur d'onde à très haute intensité, comme avec un laser.
Cercle chromatique décliné en deux saturations.
Dans le document « cube des couleurs », on définira mathématiquement la valeur, la teinte et la saturation d’une couleur. On verra que le système RVB peut aussi être exprimé selon ces composantes et correspondent en français au système TSL (Teinte, Saturation et Luminosité) et en anglais au système HSL (d'après les trois mots anglais Hue Saturation et Lightness,).
Les lois de Grassmann
Les lois de Grassmann sont des lois régissant la superposition des couleurs en colorimétrie dans le cadre de la synthèse additive. Elles sont à la base de tout calcul colorimétrique. Les études menées par Hermann Grassmann au xixe siècle sur la perception humaine des couleurs l’ont mené à énoncer trois lois en 1853. Ces lois expriment le principe de la trichromie propre à l’œil humain : une sensation colorée peut être égalisée par un mélange additif de trois couleurs primaires convenablement choisies.
Elles se réduisent à trois propositions, qui peuvent être traduites par les règles usuelles de calculs sur les coordonnées d’un vecteur dans l’espace :
Première loi de Grassmann :
Toute sensation colorée C peut être reproduite par un mélange additif des trois couleurs primaires choisies R, V, B :
\( C \equiv rR + vV + bB \) aussi noté
\( C
\begin{pmatrix}
r \\
v \\
b \\
\end{pmatrix}
\).
\( r \), \( v \) et \( b \) sont des paramètres réels représentant la puissance des trois éclairages ou l’intensité lumineuse correspondante.
L'égalisation de la sensation, symbolisée par le signe \( \equiv \) , est fondée sur le principe du métamérisme, selon lequel deux couleurs perçues de façon identique n'ont pas nécessairement la même composition spectrale.
En termes géométriques, si l’on voit les couleurs primaires comme trois vecteurs linéairement indépendants de l’espace (et formant donc une base), la première loi de Grassmann dit que tout vecteur « couleur » est combinaison linéaire des trois vecteurs.
À bien noter que les coefficients \( r \), \( v \) et \( b \) peuvent être négatifs ; c’est le cas par exemple pour des couleurs très saturées. Physiquement une égalité de la forme \( C \equiv 0,2R + 0,7V + 0,5B \) doit se lire : \( C + 0,2R \equiv 0,7V + 0,5B \) (c’est le cas par exemple pour un cyan ou il faut lui ajouter du rouge pour le délaver ; voir document « cube des couleurs »).
Il en découle que si \( C_1 \equiv C_2 \) et \( C_2 \equiv C_3 \), alors : \( C_2 \equiv C_1 \) (symétrie) et \( C_1 \equiv C_3 \) (transitivité).
Deuxième loi de Grassmann : additivité
La sensation colorée provoquée par un mélange additif de deux ou plusieurs lumières colorées est égalisée par la somme des intensités des primaires correspondant à chacune des lumières.
Soient deux couleurs égalisées par : \( C_1 \equiv r_1 R + v_1 V + b_1 B \) et \( C_2 \equiv r_2 R + v_2 V + b_2 B \), alors
Il en découle que si \( C_1 \equiv C_2 \) et \( C_3 \equiv C_4 \) alors : \( C_1 + C_5 \equiv C_2 + C_5 \) et \( C_1 + C_3 \equiv C_2 + C_4 \).
Troisième loi de Grassmann : dilatation
Si une lumière colorée baisse ou augmente en intensité, il faut, pour l'égaliser, modifier les trois primaires dans les mêmes proportions :
Pour \( k \) réel positif, si \( C \equiv r R + v V + b B \), alors \( k C \equiv kr R + kv V + kb B \),
c’est-à-dire \( k C
\begin{pmatrix}
kr \\
kv \\
kb \\
\end{pmatrix}
\).
Le cube colorimétrique
On a vu qu’en synthèse additive, on peut obtenir n’importe quelle couleur donnée (ou presque) par combinaison des trois couleurs primaires, le rouge, le vert et le bleu.
Informatiquement parlant, on code une couleur comme une suite de trois nombres \( r \), \( v \), \( b \) indiquant l’intensité respective de ces trois couleurs primaires. Le modèle RVB propose de coder sur un octet chaque composante de couleur, ce qui correspond à 256 intensités de rouge (de 0 à 255), 256 intensités de vert et 256 intensités de bleu, soient 16 777 216 possibilités théoriques de couleurs différentes, c’est-à-dire plus que ne peut en discerner l’œil humain (environ 2 millions). En divisant par 255, chaque intensité lumineuse varie donc entre 0 et 1. 1 est donc l’intensité maximale de chaque composante.
Ce principe de synthèse additive de la couleur se retrouve dans la plupart des dispositifs lumineux de restitution de la couleur : CRT, LCD, Plasma.
Dans les écrans cathodiques (CRT), trois canons à électrons balayent une grille de photophores rouges, verts et bleus, avec une intensité variable. Le résultat est un point coloré, appelé pixel.
Dans les écrans à cristaux liquides (LCD), trois matrices de cristaux liquides sont contrôlées par un couple de polariseurs qui change l'orientation des cristaux, en modifiant la transparence de chaque pixel, ces matrices sont rétroéclairées à travers des filtres rouge, vert et bleu.
On peut donc représenter chaque couleur C comme un point d’un cube de l’espace de dimension trois en considérant un repère orthonormé dont les trois axes sont respectivement dirigés par les vecteurs \( \overrightarrow{R} \), \( \overrightarrow{V} \) , \( \overrightarrow{B} \) et représentent les intensités de rouge, de vert et de bleu de la couleur. Dans ce repère, un point a donc des coordonnées \( (r ; v ; b) \).
Sur le cube, l’origine N représente ainsi le noir \( (r = v = b = 0) \) et le sommet opposé \( (r = 1 ; v = 1 ; b = 1) \) le blanc.
Les trois sommets de coordonnées (1 ; 0 ; 0), (0 ; 1 ; 0) et (0 ; 0 ; 1) représentent les trois couleurs de base (rouge, vert, bleu) et les trois sommets opposés, (0 ; 1 ; 1), (1 ; 0 ; 1) et (1 ; 1 ; 0), le cyan, le magenta et le jaune.
La diagonale du cube représentée en pointillés est appelé l’axe achromatique, axe Noir-Blanc, ou axe des gris (voir « valeur » plus haut). C’est l’ensemble des points de coordonnées \( (x ; x ; x) \) avec \( x \in [0 ; 1] \).
LE CUBE DES COULEURS
Niveau : 1re STD2A Prérequis : cube colorimétrique Lien avec le programme : cube des couleurs, repérage dans l'espace. Lien avec « Les maths au quotidien » : Représentations visuelles.
Cliquer sur l'élément à placer (à gauche)
Cliquer sur le cube de couleurs
Voici une première vue du cube des couleurs (faces du cube, l’intérieur du cube est caché).
Retrouver et tracer le repère \( (N ; \overrightarrow{R} , \overrightarrow{V}, \overrightarrow{B}) \).
Voici une deuxième vue du cube des couleurs (faces du cube, l’intérieur du cube est caché).
Retrouver et tracer le repère \( (N ; \overrightarrow{R} , \overrightarrow{V}, \overrightarrow{B}) \).
LE CUBE DES COULEURS
Niveau : 1re STD2A Prérequis : cube colorimétrique Lien avec le programme : cube des couleurs, patron. Lien avec « Les maths au quotidien » : Représentations visuelles.
Voici les six faces du cube des couleurs.
Une face étant déjà placée, sélectionner chacune des autres faces pour former un patron du cube des couleurs.
Choisir une face ici...
Choisir la position des faces du cube ici...
LE CUBE DES COULEURS
Niveau : 1re STD2A Prérequis : cube colorimétrique Lien avec le programme : cube des couleurs, perspective axonométrique, section du cube des couleurs. Lien avec « Les maths au quotidien » : Représentations visuelles.
Le cube des couleurs présente un inconvénient ... c’est son opacité ! Pour mieux « y voir », il n’y a qu’un moyen, c’est de le « couper ». Voici plusieurs sections planes du cube des couleurs. Les sommets de chacune des sections sont soit des sommets du cube, soit des milieux d’arêtes.
Dans chacune des situations suivantes, on coupe le cube des couleurs par un plan.
Déterminer la nature de chacune des sections obtenues.
La section est un
Le cube des couleurs présente un inconvénient ... c’est son opacité ! Pour mieux « y voir », il n’y a qu’un moyen, c’est de le « couper ». Voici plusieurs sections planes du cube des couleurs. Les sommets de chacune des sections sont soit des sommets du cube, soit des milieux d’arêtes.
Dans chacune des situations suivantes, on coupe le cube des couleurs par un plan.
Déterminer la nature de chacune des sections obtenues.
La section est un
Le cube des couleurs présente un inconvénient ... c’est son opacité ! Pour mieux « y voir », il n’y a qu’un moyen, c’est de le « couper ». Voici plusieurs sections planes du cube des couleurs. Les sommets de chacune des sections sont soit des sommets du cube, soit des milieux d’arêtes.
Dans chacune des situations suivantes, on coupe le cube des couleurs par un plan.
Déterminer la nature de chacune des sections obtenues.
La section est un
Le cube des couleurs présente un inconvénient ... c’est son opacité ! Pour mieux « y voir », il n’y a qu’un moyen, c’est de le « couper ». Voici plusieurs sections planes du cube des couleurs. Les sommets de chacune des sections sont soit des sommets du cube, soit des milieux d’arêtes.
Dans chacune des situations suivantes, on coupe le cube des couleurs par un plan.
Déterminer la nature de chacune des sections obtenues.
La section est un
Le cube des couleurs présente un inconvénient ... c’est son opacité ! Pour mieux « y voir », il n’y a qu’un moyen, c’est de le « couper ». Voici plusieurs sections planes du cube des couleurs. Les sommets de chacune des sections sont soit des sommets du cube, soit des milieux d’arêtes.
Dans chacune des situations suivantes, on coupe le cube des couleurs par un plan.
Déterminer la nature de chacune des sections obtenues.
La section est un
La section 3 contient toutes les couleurs rouges et cyan du cube des
couleurs. Elle contient également l’axe achromatique, qui délimite les
deux « familles » de couleurs.
La section 1 s’appelle triangle de Maxwell. On admet que ce triangle
est parallèle à l’hexagone de la section 2 et il est orthogonal à l’axe
achromatique.
Le triangle de Maxwell, comme l’hexagone, contient toutes les teintes
de couleurs. Sur le triangle de Maxwell ou bien sur l’hexagone, à
partir du centre, tous les points situés sur une même demi-droite ont la
même teinte. De plus, on voit bien que plus on s’éloigne du centre et
plus les couleurs sont pures, vives. Enfin, les couleurs sur l’hexagone
sont plus clairs que sur le triangle de Maxwell.
Ces constatations amènent maintenant à des définitions mathématiques de la teinte, de la saturation et de la valeur d’une couleur...
Soit une couleur C du cube des couleurs. On se place dans le repère orthonormal \( (N ; \overrightarrow{R}, \overrightarrow{V}, \overrightarrow{B}) \).
On considère le plan P passant par C et orthogonal à l’axe achromatique. Ce plan coupe l’axe
achromatique en un point G.
Par la relation de Chasles, le vecteur \( \overrightarrow{NC} \) se décompose comme somme des deux vecteurs \( \overrightarrow{NG} \) et
\( \overrightarrow{GC} \).
\( \overrightarrow{NG} \) est la composante achromatique du vecteur \( \overrightarrow{NC} \). \( \overrightarrow{NG} \) étant orthogonal à \( \overrightarrow{GC} \), C est le gris le plus proche de la couleur C.
\( \overrightarrow{GC} \) est la composante chromatique du vecteur \( \overrightarrow{NC} \).
Définitions
- on appelle valeur (ou luminosité) de la couleur C, la distance NG, c’est-à-dire la norme de la
composante achromatique \( \overrightarrow{NG} \) .
- on appelle saturation de la couleur C, la distance GC, c’est-à-dire la norme de la composante
chromatique \( \overrightarrow{GC} \).
- Pour une couleur C qui n’est pas un gris, on appelle teinte de la couleur C, la mesure de l’angle,
dans le plan P, entre les deux demi-droites [GC) et la demi-droite d’origine G dirigée vers le rouge,
en degrés, mesurée dans le sens anti-horaire.
Remarque
D’autres définitions sont possibles (comme par exemple, pour la valeur, la plus grande
des trois coordonnées du point C...)
LE CUBE DES COULEURS
Niveau : 1re STD2A Prérequis : cube colorimétrique Lien avec le programme : cube des couleurs, coordonnées d'un point et d'un vecteur de l'espace et lien avec les couleurs, coordonnées de la somme de deux vecteurs, du produit d'un vecteur par un nombre réel. Lien avec « Les maths au quotidien » : Représentations visuelles.
Dans le repère \( (N ; \overrightarrow{R}, \overrightarrow{V}, \overrightarrow{B}) \), le point \( C \) a pour coordonnées \( (r ; v ; b) \).
Le point G a pour coordonnées \( (g ; g ; g) \), il est caractérisé par :
\( \overrightarrow{CG} \) est orthogonal à \( \overrightarrow{NG} \)
Après calculs, on trouve :
\( g \) =
Voici, dans un plan frontal, le triangle de Maxwell de la section 2.
On a tracé les médiatrices du triangle.
Pour chacune des couleurs \( C_1 \) et \( C_2 \) du triangle de Maxwell, déterminer sa teinte, sa saturation et sa valeur.
Pour la valeur et la saturation, écrire le résultat sou forme racine(a)/b.
Couleur \( C_1 \)
Couleur \( C_2 \)
Valeur
Teinte degrés
Saturation
Valeur
Teinte degrés
Saturation
Voici, dans un plan frontal, l'hexagone de la section 2.
On a tracé les apothèmes de l'hexagone.
Pour chacune des couleurs \( C_3 \) et \( C_4 \) de l'hexagone, déterminer sa teinte, sa saturation et sa valeur.
Pour la valeur et la saturation, écrire le résultat sou forme racine(a)/b.
Couleur \( C_3 \)
Couleur \( C_4 \)
Valeur
Teinte degrés
Saturation
Valeur
Teinte degrés
Saturation
Quelques explications
Considérons une source lumineuse supposée « blanche », éclairant une surface réceptrice (l’œil, un écran, le capteur d’un appareil photo numérique, voire… une feuille d’arbre).
Cette source lumineuse peut par exemple être générée par trois sources de lumières rouge, verte et bleue d’intensité égale. Si on désire réduire la luminosité, on peut utiliser un diaphragme qui permettra de n’obtenir qu’une fraction de la luminosité initiale ou bien réduire proportionnellement l’intensité des trois lumières rouge, verte et bleue.
Nous associons la luminosité ainsi obtenue à des nuances de gris (voir « valeur d’une couleur »).
On convient de désigner les gris par un pourcentage : le « gris moyen » ou « gris 50 % » correspond à 50 % de la valeur du blanc initial ; aux extrêmes, le « gris 0 % » est simplement le noir et le « gris 100 % » n’est autre que le blanc initial.
Le dégradé représenté ci-dessous correspond à ces conventions.
D’un point de vue informatique (ou infographique) les « niveaux de gris » sont codés sous forme de nombres entiers compris entre 0 et 255, pour la simple raison qu’avec huit chiffres binaires (bits) un maximum de 256 = 28 valeurs distinctes de l’intensité lumineuse peuvent être atteintes. La valeur 0 représente la couleur noire, et la valeur 255 la couleur blanche (voir l'activité Cube des couleurs qui a permis de définir l'axe achromatique).
Certains logiciels proposent des « curseurs » allant de 0 à 255 (ou de 00 à FF en représentation hexadécimale), d’autres restent sur un pourcentage. Mathématiquement parlant, il est commode d’associer ces grandeurs aux nombres réels de l’intervalle [0 ; 1] tout en sachant que, dans une image numérique, le nombre effectif de niveaux de gris distincts reste fini.
En résumé :
0 représente le noir, 0,5 = 50 % représente le gris moyen et 1 = 100 % représente le blanc.
On passe de la représentation « mathématique » à la représentation « informatique » par la formule ENT(255*g), g désignant le niveau de gris dans [0;1] et ENT la partie entière.
Le passage inverse se fait par une division par 255.
Ci-contre une image représentant Alan Turing disputant une course de trois miles en 1946.
Le rectangle est décomposé en un certain nombre de petits carrés, les pixels, et à chaque pixel on attribue un nombre qui représente une nuance de gris.
La finesse de la décomposition (le nombre de pixels) est la définition de l’image. Ici bien sûr, la définition de cette image particulière n’est pas bonne.
Toute image n’utilisant que les nuances de gris peut ainsi être représentée par un tableau contenant autant de lignes et de colonnes que l’image contient de lignes et de colonnes de pixels, chacune des cases du tableau étant occupée par un nombre compris entre 0 ou 1. En mathématiques, un tel tableau s’appelle une matrice.
Alan Turing (1912 - 1954) est un mathématicien britannique, auteur de l'article fondateur de la science informatique[] qui allait donner le coup d'envoi à la création des calculateurs universels programmables (ordinateurs). Il y présente sa machine de Turing et les concepts modernes de programmation et de programme.
Il est également à l'origine de la formalisation des concepts d'algorithme et de calculabilité qui ont profondément marqué cette discipline. Son modèle a contribué à établir définitivement la thèse Church-Turing qui donne une définition mathématique au concept intuitif de fonction calculable. Durant la Seconde Guerre mondiale, il joue un rôle majeur dans les recherches sur les Cryptographies générées par la machine Enigma utilisée par les nazis.
Après la guerre, il travaille sur un des tout premiers ordinateurs, puis contribue de manière provocatrice au débat déjà houleux à cette période sur la capacité des machines à penser en établissant le test de Turing. Vers la fin de sa vie, il s'intéresse à des modèles de morphogenèse du vivant conduisant aux « structures de Turing ».
Exemples :
Abordons maintenant un autre aspect de la transformation d’une image.
Nous avons une certaine image et nous souhaitons agir sur sa luminosité, c’est-à-dire changer (ou pas) la luminosité de chaque pixel de l’image.
Prenons un exemple très courant :
Le négatif de l’image
On transforme la matrice A associée à l’image en remplaçant chaque nombre \( x \) par son complément à 1, c’est-à-dire \( 1-x \). On obtient la matrice B, associée à l’image de droite, qui est le négatif de l’image de gauche.
On constat que le blanc et le noir sont échangés, le gris moyen conservé.
Cette transformation est également appelée inversion vidéo.
Un tel procédé, qui transforme les niveaux de gris des pixels d’une image, est appelé opérateur de traitement d'images.
Dans cet exemple, les modifications ont lieu pixel par pixel à l’aide d’une fonction \( f \) définie de [0 ; 1] dans [0 ; 1] qui transforme la valeur de gris \( x \) d’un pixel en la valeur de gris \( f (x) \).
C’est pourquoi le procédé est qualifié d’opérateur pixel à pixel (ou point à point). La fonction \( f \) s’appelle la fonction de transfert.
Dans notre exemple d’inversion vidéo, la fonction de transfert est la fonction \( f : x ⟼ 1 - x \).
Nous pouvons donc abstraire ce procédé en figurant côte à côte les deux dégradés :
À l’abscisse \( x \) on trouve (en bas) le gris de « valeur » \( x \). À cette même abscisse on a (en haut) la valeur du dégradé transformé par le passage en négatif, qui est \( 1 − x \). On peut donc dire que le dégradé du haut est une sorte de représentation visuelle (graphique ?) de la fonction \( f \).
Activité 1 : conversion d’une image en niveaux de gris
Niveau : 1re STD2A Prérequis : paragraphe « cube colorimétrique » et mieux, après activité « cube des couleurs ». Lien avec le programme : cube des couleurs, coordonnées d’un point et d’un vecteur de l’espace et lien avec les couleurs.
Intéressons-nous à une image dite en « noir et blanc ».
Une telle image n’est plus codée en couleurs mais en niveaux de gris. Les gris sont des couleurs caractérisées par le fait que leurs composantes rouge, verte et bleue sont en quantité égale : dans le cube des couleurs, l’axe des gris est la grande diagonale du cube, ensemble des points de coordonnées \( (x ; x ; x) \) avec \( x \in [0 ; 1] \).
Dans le repère \( (N ; \overrightarrow{R} , \overrightarrow{V} , \overrightarrow{B} ) \), le point C a pour coordonnées \( (r ; v ; b) \).
Lors de la conversion d’une image couleur en « noir et blanc », une couleur codée \( (r ; v ; b) \) est remplacée par la couleur grise, codée \( (g ; g ; g) \), la plus « proche » de la couleur initiale : géométriquement, c’est le point \( G (g ; g ; g) \) réalisant le minimum de distance entre le point \( C (r ; v ; b) \) et l’axe achromatique. C’est donc le point \( G (g ; g ; g) \) tel que \( \overrightarrow{CG} \) est orthogonal à \( \overrightarrow{NG} \).
À l’aide d’une feuille de papier et d’un crayon, calculer \( g \) en fonction de \( r \), \( v \) et \( b \) :
\( g= \)
En réalité, l’œil humain ne perçoit pas les trois couleurs primaires avec la même luminosité. À intensité égale, le vert parait plus lumineux que le rouge et le rouge plus lumineux que le bleu (voyez vous-même…).
La C.I.E (Commission Internationale de l'Éclairage) propose donc de remplacer la formule Gris = 1/3.Rouge + 1/3.Vert + 1/3.Bleu par deux formules :
• Dans sa recommandation 709, qui concerne les couleurs « vraies » ou naturelles :
Gris = 0,2125.Rouge + 0,7154.Vert + 0,0721.Bleu
• Dans sa recommandation 601 pour les couleurs non-linéaires, c'est-à-dire avec correction du gamma* (image vue à partir d'un écran vidéo) :
Gris = 0,299.Rouge + 0,587.Vert + 0,114.Bleu
Pour chacune d'elles, la somme des 3 coefficients vaut 1.
* Voir document « Exercices Terminale STD2A ».
Activité 2 : transformation des niveaux de gris d’une image
Niveau : 1re STD2A Prérequis : conversion d’une image en noir et blanc. Lien avec le programme : fonctions polynômes du second degré, fonctions carré et racine carré, positions relatives des courbes représentatives de ces fonctions ; lien avec l’intensité lumineuse (ramenée à un nombre réel de [0 ; 1]) et les dégradés de gris.
Exercice 1 : avec GeoGebra
1. Un premier exemple
Ouvrir le fichier GeoGebra « degrade1 »
On a représenté dans un repère du plan, sur l’intervalle [0 ; 1], la courbe représentative de la fonction \( x ⟼ x \) ainsi que celle d’une fonction \( f \) définie sur [0 ; 1] telle que \( f (x) \) appartienne à [0 ; 1].
Au gris de « valeur » \( x \), on associe le gris de valeur \( f (x) \).
Les deux dégradés de gris horizontaux présentent, pour une même abscisse a de [0 ; 1] le gris de valeur a et le gris de valeur \( f (a) \).
Cliquer sur le curseur et augmenter les valeurs de a avec la flèche de droite du clavier.
Observer comment se construisent les deux dégradés.
On a représenté dans un repère du plan, sur l’intervalle [0 ; 1], la courbe représentative de la fonction \( x ⟼ x \) ainsi que celle d’une fonction \( f \) définie sur [0 ; 1] telle que \( f (x) \) appartienne à [0 ; 1].
On a masqué les deux courbes.
Comme précédemment, le fichier permet de construire le dégradé associé à la fonction \( f \).
Questions :
À l’aide du dégradé de la fonction \( f \), conjecturer :
- le tableau de variations de la fonction \( f \).
- un éventuel axe de symétrie de la courbe représentative de \( f \).
- une éventuelle valeur de \( x \) pour laquelle les valeurs de gris des deux carrés sont égales.
La fonction \( f \) dont la courbe a été masquée est en fait la fonction
$$ x ⟼ 4x^2 + 4x $$
Démontrer vos conjectures (sur une feuille).
Exercice 2 : fonctions et dégradés de gris
Voici dans un même tableau sept fonctions nommées \( f, g, h, ... \) :
Associer à chaque dégradé la fonction \( f \) appropriée en inscrivant le nom de la fonciton qui convient ( \( f, g, h, ... \)):
associé à la fonction
associé à la fonction
associé à la fonction
associé à la fonction
associé à la fonction
associé à la fonction
associé à la fonction
Exercice 3 : le seuillage
L'opération dite de seuillage consiste à mettre à zéro tous les pixels ayant un niveau de gris inférieur ou égal à une certaine valeur, appelée seuil et à la valeur 1 les pixels ayant une valeur supérieure. Ainsi le résultat du seuillage est une image binaire ne contenant que des pixels noirs et blancs. Toutefois la difficulté réside dans le choix du seuil à adopter.
Voici une image en 256 niveaux de gris et les résultats d'une opération de seuillage avec les valeurs respectives de seuil de 0,2 et 0,5 et 0,8 :
Voici six courbes numérotées de 1 à 6.
Choisir, parmi les réponses suivantes, celle représentant la fonction de transfert associée à une opération de seuillage.
On a réalisé un algorithme qui prend en entrée une valeur de gris \( x \) d’un pixel et qui renvoie la valeur du gris de ce pixel après une opération de seuillage au seuil 0,4.
Compléter les instructions suivantes.
Variable : \( x \) nombre réel compris entre 0 et 1.
Saisir \( x \)
Si \( x \le \)
Alors \( x \) ⟵
Sinon
\( x \) ⟵
Afficher \( x \)
Exercice 4 : l’assombrissement/éclaircissement
On cherche à assombrir une photo numérique (en niveaux de gris) trop claire.
On veut agir sur les niveaux de gris des pixels de sorte que :
- Le noir reste noir
- Le blanc reste blanc
- Le gris final doit être plus sombre que le gris initial
- respect des contrastes : si la zone A initiale est plus foncée que la zone B initiale, alors la zone A finale doit être plus foncée que la zone B finale.
Choisir, parmi les propositions suivantes, celles que doit réaliser une fonction de transfert idoine.
Attention, s’il en manque une, vous obtiendrez « erreur ».
Parmi les fonctions suivantes, lesquelles pourraient être une fonction de transfert :
Parmi les fonctions suivantes, lesquelles pourraient être une fonction de transfert :
Exercice 4 : accentuation du contraste
On cherche à accentuer le contraste d’une une photo numérique (en niveaux de gris).
On veut agir sur les niveaux de gris eds pixels de sorte que :
- le noir reste noir
- Le blanc reste blanc
- Les nuances entre le gris moyen et le noir doivent être assombries
- Les nuances entre le blanc et le gris moyen doivent être éclaircies
Choisir, parmi les propositions suivantes, celles que doit réaliser une fonction de transfert idoine.
Attention, s’il en manque une, vous obtiendrez « erreur ».
La courbe représentative de f coupe la droite d’équation \( y = x \).
Parmi les courbes suivantes (rouges), lesquelles pourraient être la courbe représentative d’une fonction de transfert :
La courbe représentative de f coupe la droite d’équation \( y = x \).
Parmi les courbes suivantes (rouges), lesquelles pourraient être la courbe représentative d’une fonction de transfert :
La courbe représentative de f coupe la droite d’équation \( y = x \).
Parmi les courbes suivantes (rouges), lesquelles pourraient être la courbe représentative d’une fonction de transfert :
OPÉRATEURS LOCAUX
Prérequis : « quelques explications » et activités 1 et 2 de la partie « Niveaux de gris – Luminosité ».
On a vu dans les documents précédents la notion d’opérateur « point par point » associé à une fonction de transfert. Il existe également une autre sorte d’opérateur qui traite la valeur de gris d’un pixel en fonction du voisinage de ce pixel, c’est-à-dire en fonction des valeurs de gris des pixels qui entourent celui-ci.
On parle alors d’opérateur local.
La relation entre les valeurs des pixels de sortie et celle des pixels d'entrée est décrite par un tableau de nombres, généralement carré, appelé matrice de convolution. L’opération mathématique sous-jacente, que l’on va expliquer ci-après, s’appelle produit de convolution.
On a vu qu’une image numérique peut être associée à un tableau de nombres (matrice) comportant autant de lignes et de colonnes que l’image comporte de lignes et de colonnes de pixels. Dans ce document, les nombres du tableau sont les intensités des pixels, exprimés en ADU (ADU est Analog to Digital Unit qui correspond aux unités employées pour donner le résultat de la conversion effectuée lors de la numérisation par le convertisseur analogique vers numérique).
La matrice associée à l’image peut être très grande (par exemple de taille 512×512, ce qui représente 262 144 pixels).
Le produit de convolution met en jeu une autre matrice, plus petite, de taille 5×5 ou plus usuellement 3×3, qu’on appelle le noyau (kernel) parce que c’est le « cœur » de tous les changements qui vont affecter l’image.
Prenons un noyau de taille 3×3 :
\( \begin{matrix}
a & b & c \\
d & e & f\\
g & h & i \\
\end{matrix} \)
.
Les lettres \( a, b, c, d, e, f, g, h, i \) représente des nombres.
Le noyau va donc agir sur chacun des valeurs de gris des pixels de l’image, c’est-à-dire sur chacun des éléments de la matrice associée et ceci de la manière suivante :
Prenons un élément, noté \( n \), de la matrice associée à l’image, et qui n’est pas au bord de l’image*. On considère les éléments de cette matrice adjacents à \( n \) :
* Si on est au bord de l’image, on a plusieurs possibilités : par exemple ne pas toucher ces pixels, ou bien dupliquer le bord...
On obtient une sous-matrice de taille 3×3 :
\( \begin{matrix}
. & . & . & . & . & . & . & . & . & \\
. & . & . & . & . & . & . & . & . & \\
. & . & a & b & c & . & . & . & . & \\
. & . & d & e & f & . & . & . & . & \\
. & . & g & h & i & . & . & . & . & \\
. & . & . & . & . & . & . & . & . & \\
. & . & . & . & . & . & . & . & . & \\
. & . & . & . & . & . & . & . & . & \\
. & . & . & . & . & . & . & . & . & \\
\end{matrix} \)
La valeur \( n \) va être transformée par le noyau de la manière suivante :
- on calcule la somme des produits des nombres qui sont à la même place dans les deux matrices :
\( a\times j + b\times k + c\times l + d\times m + e\times n + f\times o + g\times p + h\times q + i\times r \).
- on divise le résultat par un nombre appelé le diviseur. Il vaut 1 ou 9 (ou 25 si le noyau est de taille 5×5).
- on ajoute enfin au résultat un nombre, appelé décalage.
Différents noyaux vont avoir différentes fonctions, comme par exemple :
- augmenter la luminosité du pixel et baisser celles de ces voisins, c’est-à-dire augmenter le contraste au voisinage du pixel. Cela peut être utile par exemple pour souligner la présence d’une étoile sur une image du ciel nocturne d’intensité constante avec une étoile faible dont toute la luminosité est concentrée dans un seul pixel.
- augmenter la netteté de l’image.
- rendre flou une image.
- détecter les contours des éléments sur l’image, c’est-à-dire repérer les points de l’image qui correspondent à un changement brutal de l'intensité lumineuse.
Prenons trois exemples :
Ces exemples semblent « sortir du chapeau » mais en réalité ils sont construits grâce à des mathématiques plus complexes, que l’on rencontre dans le supérieur.
 Niveau : Terminale générale
Niveau : Terminale générale

 Remarque : bien que la synthèse additive est généralement employée avec les primaires RVB (rouge, vert, bleu), elle peut être fondée sur l'association d'autres primaires. On peut également obtenir une synthèse additive avec un nombre de couleurs primaires supérieure à 3.
Remarque : bien que la synthèse additive est généralement employée avec les primaires RVB (rouge, vert, bleu), elle peut être fondée sur l'association d'autres primaires. On peut également obtenir une synthèse additive avec un nombre de couleurs primaires supérieure à 3. 













 Le triangle de Maxwell, comme l’hexagone, contient toutes les teintes
de couleurs. Sur le triangle de Maxwell ou bien sur l’hexagone, à
partir du centre, tous les points situés sur une même demi-droite ont la
même teinte. De plus, on voit bien que plus on s’éloigne du centre et
plus les couleurs sont pures, vives. Enfin, les couleurs sur l’hexagone
sont plus clairs que sur le triangle de Maxwell.
Le triangle de Maxwell, comme l’hexagone, contient toutes les teintes
de couleurs. Sur le triangle de Maxwell ou bien sur l’hexagone, à
partir du centre, tous les points situés sur une même demi-droite ont la
même teinte. De plus, on voit bien que plus on s’éloigne du centre et
plus les couleurs sont pures, vives. Enfin, les couleurs sur l’hexagone
sont plus clairs que sur le triangle de Maxwell.
 Ces constatations amènent maintenant à des définitions mathématiques de la teinte, de la saturation et de la valeur d’une couleur...
Ces constatations amènent maintenant à des définitions mathématiques de la teinte, de la saturation et de la valeur d’une couleur...  Dans le repère \( (N ; \overrightarrow{R}, \overrightarrow{V}, \overrightarrow{B}) \), le point \( C \) a pour coordonnées \( (r ; v ; b) \).
Dans le repère \( (N ; \overrightarrow{R}, \overrightarrow{V}, \overrightarrow{B}) \), le point \( C \) a pour coordonnées \( (r ; v ; b) \). 







 Intéressons-nous à une image dite en « noir et blanc ».
Intéressons-nous à une image dite en « noir et blanc ». 













